Unistellar eVscope - Information (4.5" Newton)
Introduction | About the eVscope | Look | Sensor, Pixel Data, Field of View | Image Size (Pixels) | How To Observe with the eVscope | Visited Sky Objects | First Experiences | Photo Attempts | First Conclusions | Links | Appendix: Data
Archive
On this page I provide some information about my electronic 4,5" Newton telescope Unistellar eVscope 114 mm/450 mm (f/4)*. Most of this information is valid for the eQuinox as well (and to some degree for the eVscope 2 and eQuinox 2, both of which offer a new sensor).
*) I took part in a Kickstarter campaign in mid-November 2017; my eVscope arrived on January 27, 2020; sold in mid-March 2022.
| Note: At the beginning of December 2021, I received an eVscope 2 ordered in October (I had ordered it, because I was convinced by the better image quality and the slightly larger field of view). I therefore sold my eVscope in mid-March 2022. For this reason, I will not report any further experiences with this telescope here. In addition, I will adapt this page only in a limited fashion to new models. |
Notes:
- See page Overview of the Unistellar Pages for just that!
- For a comparison with similar products, see page DSO Photography for Dummies - Motivation and Introduction.
- In spring 2021, Unistellar launched the eQuinox, which lacks an electronic eyepiece and is more or less identical to the original eVscope. More on this further below and from Unistellar!
- In mid-September 2021, Unistellar launched the eVscope 2, which offers a new sensor chip (IMX347) and an improved electronic eyepiece. More on this further below, on page Unistellar eVscope 2 - Information (4.5" Newton), and from Unistellar! I ordered the eVscope 2 in October 2021 and received it at the beginning of December 2021.
- In January 2023, Unistellar launched the eQuinox 2, which offers a new sensor chip (IMX347) but lacks the electronic eyepiece (just like the original eQuinox).
- This page covers primarily the original eVscope that I owned myself (up to March 2022)!
Introduction
In November 2017, when reading the "Adventure Astronomy" newsletter , I learned about the Unistellar eVscope for the first time. For a few weeks already, a Kickstarter campaign was running on this new kind of telescope (it ended up with 2.144 supporters and 2,209,270 $ in cash by November 24, 2017), and I also supported this project. Regrettably, I was already far too late to get hold of one of the two cheap offers. The delivery of the telescope, which can be assigned to "electronically augmented astronomy" (EAA), was initially scheduled for November 2018 (I received my sample at the end January 2020).
 |
 |
 |
 |
Photos: My eVscope (End of January 2020)
Bridging the Waiting Time...
Experienced Kickstarter supporters, however, rather expected one or more years
more to delivery... Therefore, I decided to also buy a similar solution (which
may be more flexible, but was also be much more cumbersome to install and operate)
in order to get already an idea of the possibilities of the eVscope.
But note that this solution was still much simpler than "true" astro
photography. It was an Atik Infinity Color
camera (it has a similar Sony chip as the eVscope, but the chip size is
larger, and it is a CCD chip) that I put on my Sky-Watcher
Star Discovery mount and initially on my 6" Explorer
150PDS Newton tube (except for the camera, a "pure" Sky-Watcher
solution...) and later on my Celestron C8 with f/6.3
reducer/corrector.
>> In the meantime, I sold all this equiment...
Delivery: Delivery Delayed for Three/Four Times...
As stated above, during the Kickstarter campaign for the eVscope in November 2017, the delivery was announced for November 2018. It was, however, delayed for three/four times:
- On May 3, 2018 Unistellar announced that the delivery of the eVscope was postponed from November 2018 to May 2019 (that is, for 6 months). They also published the following industrial roadmap:
|
|
- On March 18, 2019 Unistellar once again postponed the delivery of the eVscope, now to September 2019 earliest (some few units were told to be delivered in May 2019).
- On September 26, 2019, Unistallar announced "finalized" delivery dates from December 2019 to February 2020.
- And while the first deliveries had already begun, which took much longer than expected (I was one of the receivers, my eVscope arrived on January 27, 2020), an announcement was made on Janaury 30, 2020: all the buyers will receive a delivery date in the near future, and deliveries will extend into the whole May 2020. To my knowledge, this, however, only applies to the USA, Canada and Europe, in other countries it will take even longer (partly because of certification).
- In spring 2020, the delivery date of the second batch of eVscope telescopes was postponed several times (the first 1000 eVscopes had already been delivered) due to the corona crisis and the resulting delays.
Delivery: My Delivery (Course)
- On November 27, 2019, I received an e-mail from Unistellar with the request to confirm/update my address data.
- On November 28, 2019, I received the information that I would get a tracking number in 1-2 weeks.
- On December 6, 2019, I received an e-mail from Unistellar stating that the eVscope would be shipped soon, but that I would have to pay the VAT and transport costs before (until December 12, 2019) (almost 360 $). This had to be done by credit card. At my first attempt to pay, the form was still in "test mode," and the payment was rejected. After contacting the Unistellar support, the payment succeeded soon after in my second attempt. Later on the same day, I received an e-mail from Unistellar stating that my eVscope would be shipped on that day (with video "proof") and that it would probably arrive on December 17 or 18. This did, however, not happen due to strikes in France (and probably other issues)...
- On December 16, 2019, the Unistellar App was released. And unfortunately I had to buy an iPhone (6s, used), because the app cannot be installed on my WiFi iPad.
- On January 23, 2020, I received an e-mail from Unistellar stating that the eVscope was ready for shipping with Chronopost (DPD), and I received a tracking link and a tracking number.
- And on January 27, 2020, the eVscope eventually arrived at my home (delivered by DPD)!
Further Events (Course)
- On January 28, 2020, after my first observation session, the eVscope refused to continue working - it could not be switched on correctly. The diagnosis was that the microSD card in the telescope needed to be replaced. Unistellar therefoer sent me a new microSD card. For more information on this and the following, see page First Experiences.
- On 3.2.2020 I received a new microSD card via post service, and at the same time the tools needed for the card replacement arrived. However, the card turned out to be completely new, i.e. without the software, and could not be used. So I put the old card back in, with which the eVscope worked at first. But since the eVscope could not be switched on reliably, I asked for another microSD card.
- The second microSD card arrived on February 10, 2020, this time it contained the software, and I replaced the old card with this one. Since then, the eVscope can be switched on reliably and, apart from app crashes, it works reliably (I informed the Unistellar support on February 16th). But now a new problem came up: The photos showed a large number of hot pixels. According to Unistellar, I had to take a dark frame recording to eliminate the hot pixels. This was not possible with the current version of the app, but the new app version that makes this possible would be released soon. However, it still took about a month until the new version (1.0) was actually available.
- The new version of the app was released on March 12, 2020, and I was finally
able to take a dark frame recording. In fact, most if not all of the hot
pixels disappeared afterwards! And among many other improvements, the new
app version offered the promised park function. Since I took quite a few
photos in the preceding month, all having hot pixels, a lot lot of work remains
to replace those shots with better ones.
Version 1.0.1 was released on March 26, further versions followed (latest version: version 1.0.6 from June 20, 2020) and offered useful improvements (see page First Experiences Part 2).
In September 2021, the app was already at version number 1.4.2. For the version history see page App Version History.
About the eVscope
What is the eVscope?
First of all, the eVscope is a 4.5" Newtonian telescope (aperture 112 mm, focal length 450 mm, aperture ratio f/4) on an Alt-AZ GoTo mount. Its special feature is, however, that it is designed to produce images of celestial objects that are reminiscent of photos taken with large or space telescopes (of course, in a lower resolution, but at least, it can...) and that can even show colors. The telescope is simple to use and works more or less fully automatically. The list below (similar to the graphic from the Kickstarter campaign) illustrates the main features of the eVscope:
 |
|
To be able to produce such images, the telescope uses a highly sensitive CMOS sensor. The images it produces are processed in the built-in computer using complex algorithms, especially, images are superimposed with ever new images (this is called "image stacking") that are recorded continually to reduce the noise. Also, the field rotation that arises in Alt-AZ mounts over time is eliminated by the software. The processed image is displayed in "real time" on an OLED display, which is viewed through an eyepiece (i.e., a kind of electronic viewfinder), so that a similar observation experience as in normal visual observation is achieved. As you can see in the schematics below, this design does not need a secondary mirror - the sensor resides at its place. This kind of astronomy is called "electronically augmented astronomy (EAA)", because an electronically amplified and software-processed image is viewed (see page EAA, Video Astronomy... for more information).
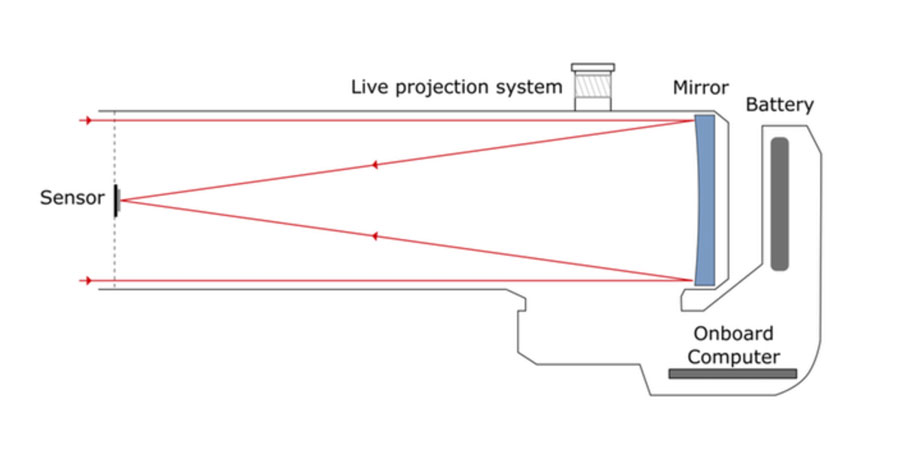
Figure: Schematics of the Unistellar eVscope (source: Unistellar)
In addition, the image can be wirelessly transferred to smartphones and computers, so that you do not need to photograph the image in the viewfinder (some of the samples published by Unistellar may be photos taken at the eyepiece, though...).
The telescope is controlled wirelessly using a smartphone app. Since the sensor signal is transmitted to the smartphone, there is no need to photograph the eyepiece view (some of the early examples published by Unistellar may be photos taken at the eyepiece) - and basically even the use of the eyepiece (Unistellar is already thinking about a version without an eyepiece...)
The alignment of the telescope is fully automatic, which I appreciate very much, because the 2-star alignment procedure of my Sky-Watcher Star Discovery AZ GoTo mount is sometimes a bit tedious (or I cannot find matching stars ...). Last but not least, the telescope is easy to transport (9 kg with tripod) and delivers acceptable results even under a light-polluted sky (which applies to astro photography in general, as I learned from a hobby astronomer who took photos with a DSLR...).
I am less interested in is the campaign mode, which is mainly pushed forward by a member of the founder team who works at the SETI Institute. But other supporters seem to be very interested in it.
Further details and technical data can be found at Data for the Unistellar eVscope.
Brief History of the eVscope
The basic idea of the eVscope was developed by Arnaud Malvache, in exchange with Laurent Marfisi, because both were disappointed of the possibilities of traditional telescopes. Malvache's idea was to use a "low-light sensor to progressively intensify the light we see through the eyepiece of a telescope." This must have happened in 2014...
Between January 2015 and November 2016, the image processing algorithms were developed, and a first prototype was built in the laboratory. During this time, also a business plan and a design concept emerged. In any case, after three years of development work, Unistellar had built a working prototype and presented it at astronomy events and computer exhibitions in Europe and the USA from early summer 2017 on. In 2017, there are also pictures available of what the final product would look like. Whether this design study was also functional, I do not know. The product is manufactured in Asia (Shanghai, China) - from parts that originate from Europe and Asia.
In October 2017, Unistellar launched a Kickstarter campaign that ended on November 24, with 2144 supporters and over 2.2 million $ capital. I participated in this campaign on 11.11.2017 ($ 1499) as supporter no. 1834.
The delivery of the finished telescope was scheduled for November 2018, but hardly anyone dared to believe this. And indeed, the delivery was postponed for several times, "finally" to December 2019 to February 2020 (in the end, delivery was announced as ranging up to the end of May 2020), which disappointed a lot of Kickstarter backers. In October 2019, a one-month beta test took place which, after all, did not require any technical changes of the telescope. The first deliveries were made in December 2019; the first batch of 1000 eVscopes was probably delivered from the end of December 2019, partly January 2020 to February 2020. The second batch was delayed due to the corona crisis and the resulting adverse effects. The respective deliveries will begin in May or June 2020. Deliveries outside of North America and Europe will probably be made even later.
Since, like many others, I did not trust the initial delivery date and also did not want to wait for a year mor more for the "experience," I bought a used Atik Infinity Colour camera at the end of 2017 to understand the basic principles, before the telescope would arrive, and also to be able to practice a bit with astrophotogrphy... And after delivery delays were announced again and again, I was even more convinced that I did the right thing when buying the camera. Unfortunately, however, I used it only very little.
Who is Behind the eVscope?
The eVscope is being developed by four French scientists, each contributing his specific knowledge to the project. The eVscope was conceived by Arnaud Malvache, who specializes in image processing. Laurent Marfisi seems to have made the eVscope into a "product," Antonin Borot developed the optical architecture of the eVscope, and Franck Marchis, who works at the SETI institute, extends the eVscope towards scientific applications (e.g. SETI campaigns).
Photos: Arnaud Malvache (CTO, left), Laurent Marfisi (CEO, second left), Antonin Borot (Chief of Optical Engineering, second right) and Franck Marchis (Chief Scientific Officer, right) (Source: Unistellar)
In March or April 2018, Unistellar "signed a production agreement with a well-known manufacturer that is highly regarded in its field and very experienced at making complex, high-quality consumer electronics." They did, however, not disclose its name. It is located in Shanghai, China.
Questions to the Founders (from Unistellar Website)
What was your initial motivation for creating Unistellar?
Classical telescopes are great for viewing the four main planets - Mars, Venus, Jupiter, and Saturn - but even expensive, high-end devices don't allow us to see much beyond that, and totally miss the truly awe-inspiring colors and details of many deep-space objects. While astronomy remains hugely popular as a hobby, most people quickly grow disappointed at what they see through their telescopes and wind up moving them into the basement, where they gather dust. This was the problem we wanted to solve. Our first goal was to make observational astronomy far more fun, exciting, and easy to do. As scientists, we also wanted to foster a strong, growing interest in astronomical research and citizen science, and we believed that the way to do that was by transforming the telescope into a far more powerful and user-friendly device.
How does the eVscope "enhance" an image? For example, you mentioned that it collects light over time…what does that mean?
Most astronomical objects are too faint to be seen by the human eye, even with a telescope. This is the case because our eyes simply cannot accumulate light the way a sensor does. Our idea was to use state-of-the-art, low-light sensor technology and proprietary algorithms to accumulate light and re-project it real time into the telescope’s eyepiece. In a matter of seconds, this allows observers to see colors and details of nebulae, galaxies, and comets that that normally cannot be seen, even in larger, traditional telescopes.
eVscope eQuinox
In the spring of 2021, Unistellar launched the eVscope eQuinox, which does not have an electronic eyepiece. It differs from the original eVscope by the absence of the eyepiece and the black color of the tube. It costs 200 Euros less than the original model. The differences between the two models are described below.
From the Unistellar Help Center: eVscope vs eQuinox
Both models are very similar and the only differences between the eQuinox and the eVscope are:
- no eyepiece for the eQuinox vs an electronic eyepiece for the eVscope;
- data storage capacity 64GB (eQuinox) vs 12GB (eVscope);
- same battery but longer battery life (there is no eyepiece to power) - 12h vs 10h;
- a black tube vs a silver grey tube - both very trendy;
There is no other hardware or software difference.
eVscope 2 vs. eQuinox, eQuinox 2, and the original eVscope
In September 2021 Unistellar launched the eVscope 2, which offers an improved electronic eyepiece and a new, larger sensor (Sony IMX347). It differs from the original eVscope with respect to tits look. It costs including the backpack with which it is sold as a package, 800 Euros more than the original model. The differences between the models (the original eVscope is no longer available; I assume that the same accounts for the original eQuinox) are described in the table below (from Unistellar Help Center: Compare our smart telescopes : eQuinox VS eQuinox 2 VS eVscope 2), to which I added some information; the table incudes the new eQuinox 2 (January 2023):
| Specifications | eQuinox | eVscope | eVscope 2 | eQuinox 2 |
| Battery Life | up to 11h (no eyepiece) |
up to 9h | up to 9h | up to 11h (no eyepiece) |
| µSD Storage Capacity | 64GB | 16GB | 64GB | 64GB |
| Display | --- | OLED screen | OLED screen | --- |
| HARDWARE | ||||
| Optical Magnification: 50x | ✔ | ✔ | ✔ | ✔ |
| Digital Magnification: up to 400x (150x recommended maximum) | ✔ | ✔ | ✔ | ✔ |
| Field of View | 27 arcmin x 37 arcmin | 27 arcmin x 37 arcmin | 34 arcmin x 47 arcmin | 34 arcmin x 47 arcmin |
| Max Magnitude: <16 in the medium quality night sky in under a minute, up to 18 in excellent conditions in a few minutes | ✔ | ✔ | ✔ | ✔ |
| Resolving Power (Image Scale) | 1.72 arcsec | 1.72 arcsec | 1.33 arcsec | 1.33 arcsec |
| Mirror Diameter: 4.5" | ✔ | ✔ | ✔ | ✔ |
| Focal Length: 450 mm | ✔ | ✔ | ✔ | ✔ |
| Motorized Alt-Az Mount with extreme tracking accuracy thanks to Automated Celestial Tracking with Feedback | ✔ | ✔ | ✔ | ✔ |
| Weight: 19.8 lbs (9 kg) including tripod | ✔ | ✔ | ✔ | ✔ |
| ELECTRONICS | ||||
| Sensor Technology: Sony Exmor with NIR technology | ✔ | ✔ | ✔ | ✔ |
| Sensor Model | IMX224 | IMX224 | IMX347 | IMX347 |
| Pixel Size | 3.75 x 3.75 µm | 3.75 x 3.75 µm | 2.9 x 2.9 µm | 2.9 x 2.9 µm |
| Pixels | 1280 x 960 | 1280 x 960 | 2048 x 1536 | 2048 x 1536 |
| Megapixels | approx. 1.23** | approx. 1.23** | approx. 4.09** | approx. 4.09** |
| Photo Pixels in EV Mode (since app version 1.3/1.4) | 2560 x 1920 | 2560 x 1920 | 3200 x 2400 | 2875 x 2156*** |
| Photo Megapixels in EV Mode (since App Version 1.3/1.4) | 4.9* | 4.9* | 7.7* | 7.7* |
*)
According to Unistellar ; **) according to Sony;
***) estimated by me
more on the eVscope 2 on page Unistellar eVscope
2 - Information (4.5" Newton)!
Look
Unboxing
The Box
 |
Box weight: 17.25 kg |
Box weight: about 17 kg (my own measurement) |
||
The box... |
Ditto |
Ditto |
||
 |
 |
 |
||
Ditto |
About 80 cm long ... |
... as can be seen here |
||
 |
 |
 |
||
About 57 cm wide ... |
... as can be seen here |
|
And about 34 cm high |


Opening the Box
 |
|
|
||
Box opened |
Ditto, closer view |
Inner lid opened |
||
 |
 |
 |
||
Second inner lid opened |
Instructions |
Foam lid removed |
||
 |
 |
 |
||
Tripod taken out of the box |
Backpack with telescope also taken out of the box |
|
Ditto |


The Box Content...
 |
|
|
||
Backpack back-side, tripod, box with accessories |
Backpack front-side, tripod, box with accessories |
Backpack opened, eVscope, and accessory box |
||
 |
 |
 |
||
Ditto, accessory box |
Diito, accessories unpacked |
eVscope in backpack, accessory bag removed |
||
 |
 |
|
||
Instructions |
Tripod fully extended |
Level in the tripod |
||
 |
 |
 |
||
eVscope |
USB-A and USB-C slots at the bottom of the eVscope |
Accessory bag provisionally filled with the supplied accessories |

eVscope Look
 |
 |
|
 |
|||
eVscope in parking position, tripod fully extended |
Ditto, tripod half extended |
|
Ditto, tube moved (finally managed this...) |
|
Ditto, "spikes" visible |
|
|
 |
|
 |
|||
Ditto |
Front view towards the mirrore mirror |
Ditto |
Ditto |
|||
 |
 |
 |
||||
Tube seen from the other side |
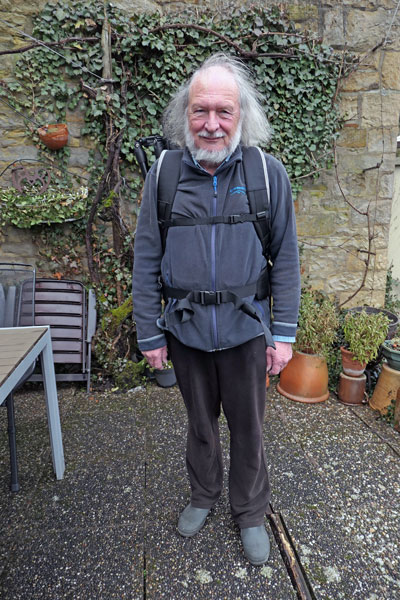
eVscope with its owner |
|
Ditto |
Backpack (mostly with Tripod)
 |
 |
 |
 |
|||
eVscope in backpack |
Backpack, tripod added |
|
Ditto |
Ditto |
||
 |
 |
 |
 |
|||
Ditto, other side |
Backpack in action |
Ditto |
Ditto |
|||
 |
 |
 |
 |
|||
Backpack in action |
|
Ditto |
Ditto |
Ditto |
||
 |
 |
|
 |
|||
Rain cover pulled out |
|
Rain cover pulled over backpack (no tripod) |
Ditto, back side |
Rain cover pulled over backpack (with tripod) |
Sensor, Pixel Data, Field of View
The eVscope (original and eQuinox) uses the same Sony sensor type as the ASI224 camera, namely the Sony IMX224/225 (CMOS), with a resolution of 1.2 MegaPixels, or 1280 x 960 pixels (H/V; the ASI224 uses a resolution of 1304 x 976 pixels). The pixel size is 3.75 µm (quadratic pixels).
With this, all sizes are known to calculate the field of view of the eVscope, which amounts to 0.61° x 0.46° (36.7'x 27.6').
The following table shows the eVscop, eVscope 2, and Vaonis Vespera in comparison with my current telescope tubes at the ASI224MC and Atik Infinity:
Field of View |
IS* | |||||||
| Telescope | Reducer | Focal Length | Aperture | f | ASI224MC* | Atik Infinity* | Remarks | |
| PS 72/432 | --- | 432 | 72 | 7 | 0.65° x 0.48° | 1.19° x 0.89° | The largest FOV | |
| C5 | --- | 1250 | 127 | 10 | 0.22° x 0.17° | 0.41° x 0.31° | FOV like C8 with reducer | |
| C5 | f/6.3 | 787.5 | 127 | 6.3 | 0.36° x 0.17° | 0.65° x 0.49° | FOV a little smaller as with TLAPO1027 | |
| C8* | --- | 2032 | 203 | 10 | 0.14° x 0.1° | 0.25° x 0.19° | The smallest FOV | |
| C8* | f/6.3 | 1280 | 203 | 6.3 | 0.22° x 0.16° | 0.4° x 0.3° | FOV like C5 | |
| TLAPO1027* | --- | 714 | 102 | 7 | 0.39° x 0.29° | 0.72° x 0.54° | FOV a little larger than for C5 with reducer | |
| in Degrees | in Minutes | |||||||
| eVscope*/eQuinox | --- | 450 | 114 | 4 | 0.61° x 0.46 | 36.7'x 27.6' | 1.72 | Same sensor as ASI224: Sony IMX224 |
| eVscope 2*/ eQuinox 2 | --- | 450 | 114 | 4 | 0.78° x 0.57° | 47' x 34' | 1.33 | New sensor: Sony IMX347 |
| Vespera* | 200 | 50 | 4 | 1.6° x 0.9° | 96' x 54' (ca.) | 2.99 | Same sensor as ASI462: Sony IMX462 | |
| Vespera Pro | --- | 250 | 50 | 5 | 1.6° x 1.6° | 96' x 96' (ca.) | 1.65 | New sensor: Sony IMX676 |
*) No longer in my possession
*) IS = image scale: describes the relative sizes of objects at 1:1 pixels (the larger the number, the smaller the objects)
Roughly simplified, the fields of view of the Atik Infinity are almost twice as large per dimension, that is, the image areas are almost four times as large as those of the ASI224MC. The PS 72/432 refractor offers a similar FOV with the ASI224MC as the eVscope (and the C5 with reducer and Atik Infinity).
Image Size (Pixels)
Even if the sensor of the eVscope has 1280 x 960 pixels and the eVscope does exploit then, this does not necessarily mean that the eVscope saves its photos in this format. Moreover, in the beginning, the "makers" of the eVscope considered observation through the eyepiece more important than saving photos, and did not pay much attention to the latter. However, this changed when the eVscope users expressed their wishes (one result is the eVscope eQuinox without eyepiece)... And so, in the course of time, the image sizes of the saved photos were changed for several times. I try to describe this briefly in the following.
Before App Version 1.0: Square Photos with 1080 x 1080 Pixels and "Overlay"
Initially (as of late 2020), the eVscope saved only square photos with a circular caption ring that served as a vignette, also called an "overlay". Because of the overlay, the image format was expanded beyond 960 x 960 to 1080 x 1080 pixels. This was to make the saved photo largely correspond to the impression in the eyepiece (even if no caption appears there). The vignette placed over the image made the usable area even smaller than 960 x 960 pixels. It also created rings on brighter objects at the edge of the image field, which could be very distracting. Because a rectangular image was shown on the screen of the smartphone used for control, which corresponded exactly to the sensor size, it often happened (to me, at least...) that picture elements were missing on the saved photo, which could still be seen well on the screen of the smartphone. The problem was then to estimate in advance what will still be on the photo and what will not...
App Versions 1.0.0 and 1.0.3 (April 21, 2020): Square Photos with 1120 Pixels and "Overlay", Rectangular Photos with 1280 x 960 Pixels without Overlay
With app version 1.0.0, Unistellar introduced the following change to the image format:
- The square image format was increased to 1120 x 1120 pixels and the vignette was changed to be smaller, so that there was less cropping on the photo and that the rings created by the vignette were less distracting.
And with app version 1.0.3, Unistellar introduced a long-requested change to the image format:
- The eVscope now offered a rectangular image format having the sensor format of 1280 x 960 pixels, so that everything you can see on your smartphone screen really gets into the photo ("Making it possible to save an observation record without the Unistellar overlay").
Unfortunately, the rectangular images lose the information that appears in the overlay, especially the dwell time in Enhanced Vision mode. Unistellar never responded to my requests to provide this in one form or another. Moreover, the selection of the rectangular image format is so hidden and "cloistered" in the user interface that quite a few eVscope users did not find this option...
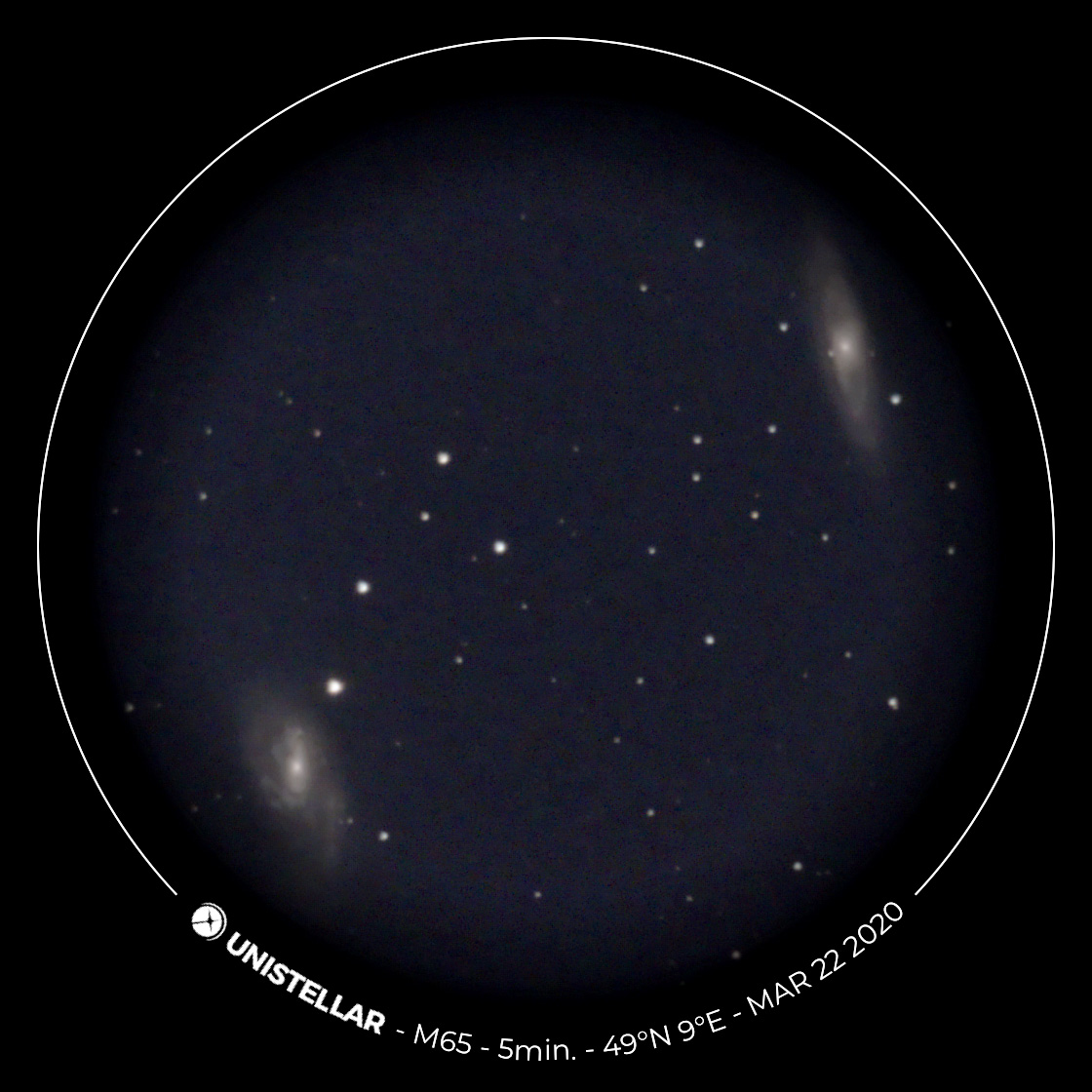
Example: For M 65/66 the overlay makes it quite tight, without overlay both fit well into the image:
 |
 |
|
M 65 & M 66 - March 22, 2020, processed |
M 65 & M 66 - April 23, 2020, processed |
Example: With M 84/86, there is now more room for a third galaxy (NGC 4402):
 |
 |
|
M 86 and M 84 (right; top left NGC 4402) - March 25, 2020, processed |
M 86 and M 84 (right; top left NGC 4402) - April 22, 2020, processed |
App Version 1.3: Scaling to Twice the Side Length (2560 x 1920) in Enhanced Vision Mode
For app version 1.3, Unistellar announced, "Four times larger observation records for even more impressive memories of your stargazing." In plain English, this meant that starting with the new app version, the image in Enhanced Vision mode is scaled up to twice the side length (i.e., four times the area), or 2560 x 1920 pixels. In Live View mode, the image size remains at 1120 (square) or 1280 x 960 pixels (rectangular).
When I read this, I was horrified at first, because upscaling actually only makes photos that are not particularly sharp even blurrier. However, more detailed comparisons with "before" and "after" taken photos showed that a new image processing was introduced, which makes the photos look sharper and better. But there are also exceptions like globular clusters and galaxies with bright cores, which are now more washed out. I discuss this on page Old Versus New Image Processing (since V. 1.3).
It remains to be seen whether this will be the last word regarding the image format for the eVscope (eQuinox) or not...
How To Observe with the eVscope
Page Observation in Brief offers instructions for using the eVscope.
Visited Sky Objects
In order to avoid redundancy and double work, I moved the list of visited sky objects to a separate page: Deep Sky Observations with eVscope (Complete Object List)
First Experiences
General Experiences
For space reasons, I outsourced my first general experiences with the eVscope to separate pages: First Experiences, First Experiences Part 2, and Further Experiences (WLAN, data transfer). They refer to app version 1.0 and earlier.
Observations
- The first observation sessions can be found, again for space reasons, on page First Observation Sessions.
- Similar to my visual observations, I report further observation sessions only in short form and present the best photos in my eVscope photo galleries: Photo Gallery (Messier Catalog) - Photo Gallery (Other) - Specialty Gallery Part 1 - Part 2.
- Here is the first page dedicated to my observations with the eVscope: Deep Sky Observations with eVscope Beginning of 2020.
Photo Attempts
First Photo Attempt with the eVscope
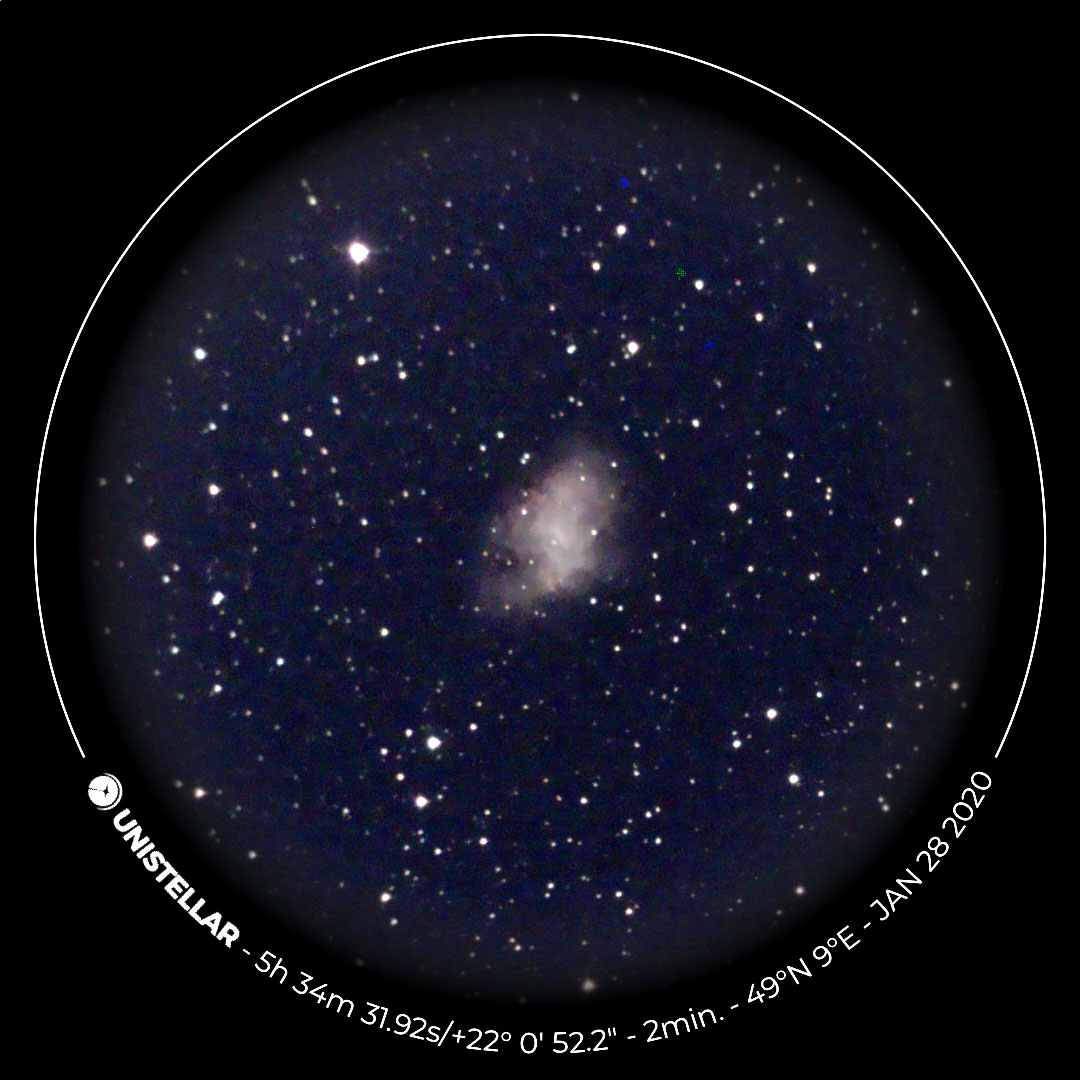
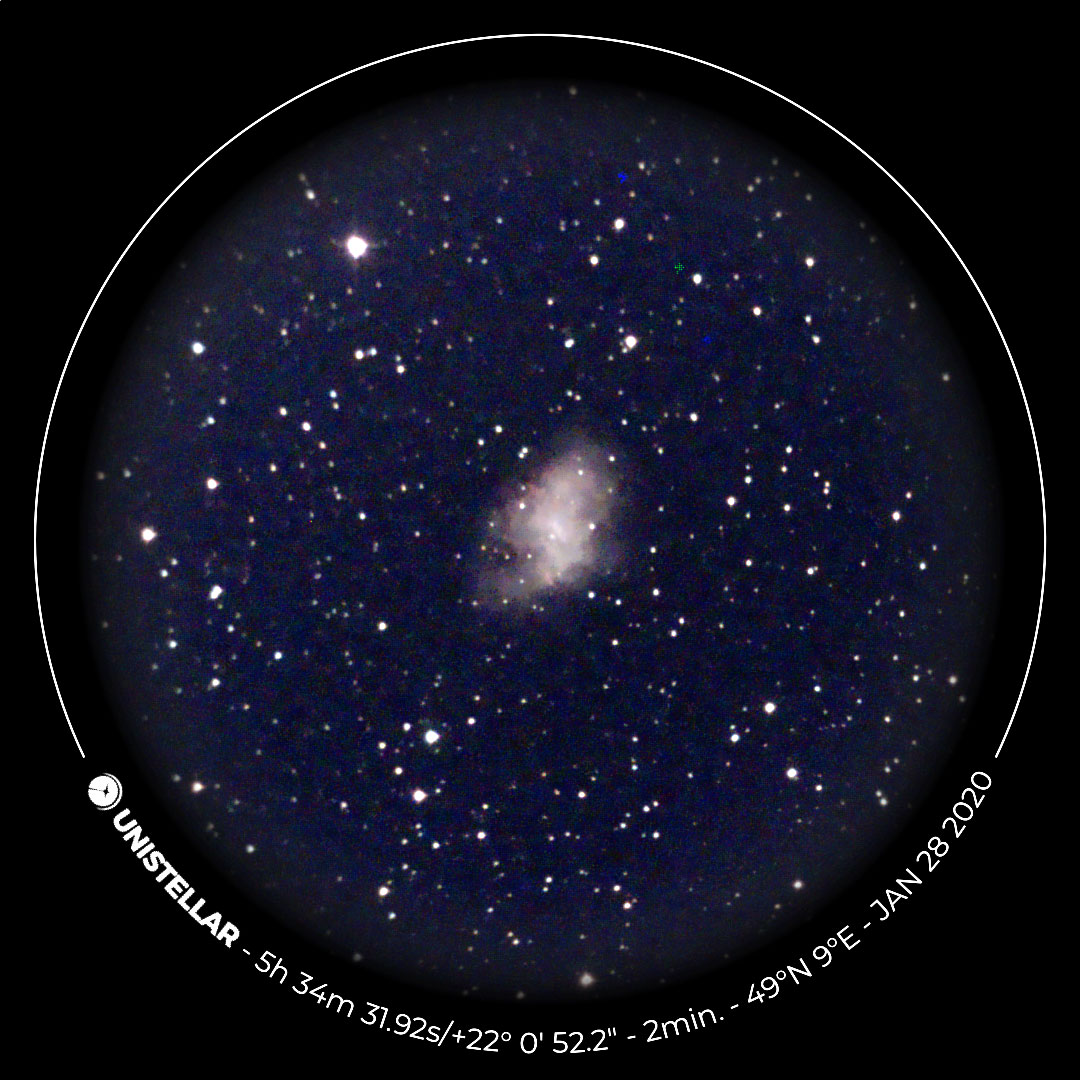
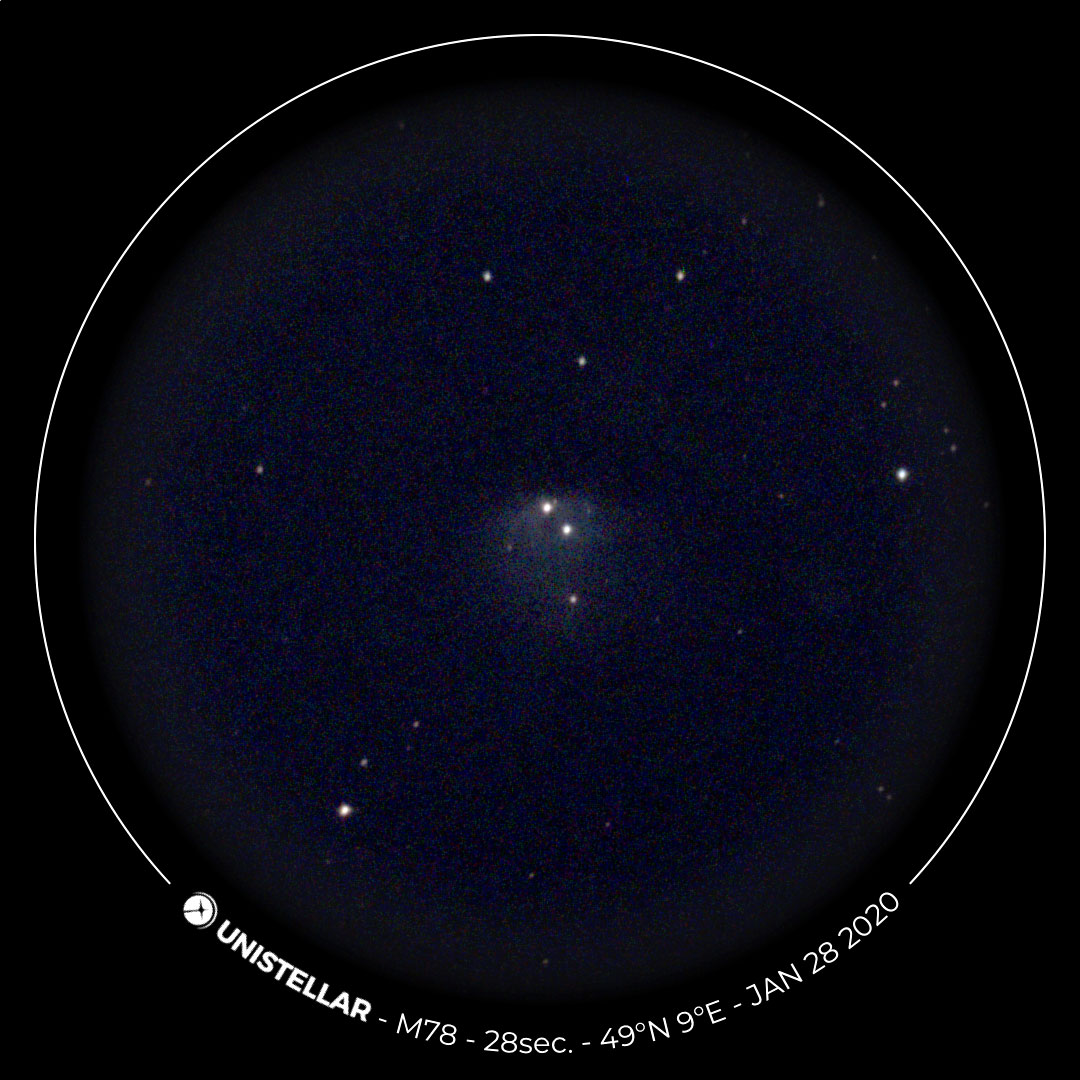
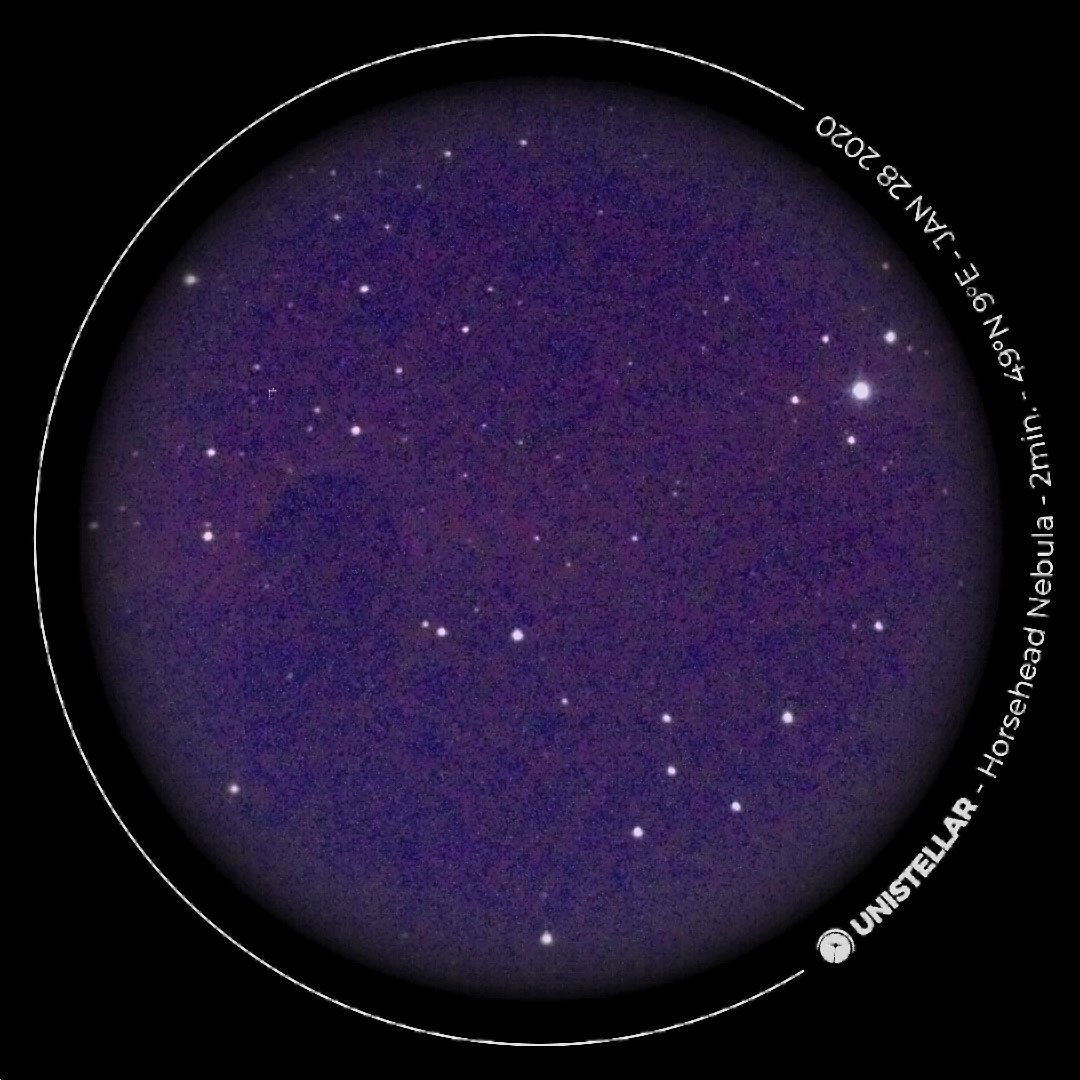
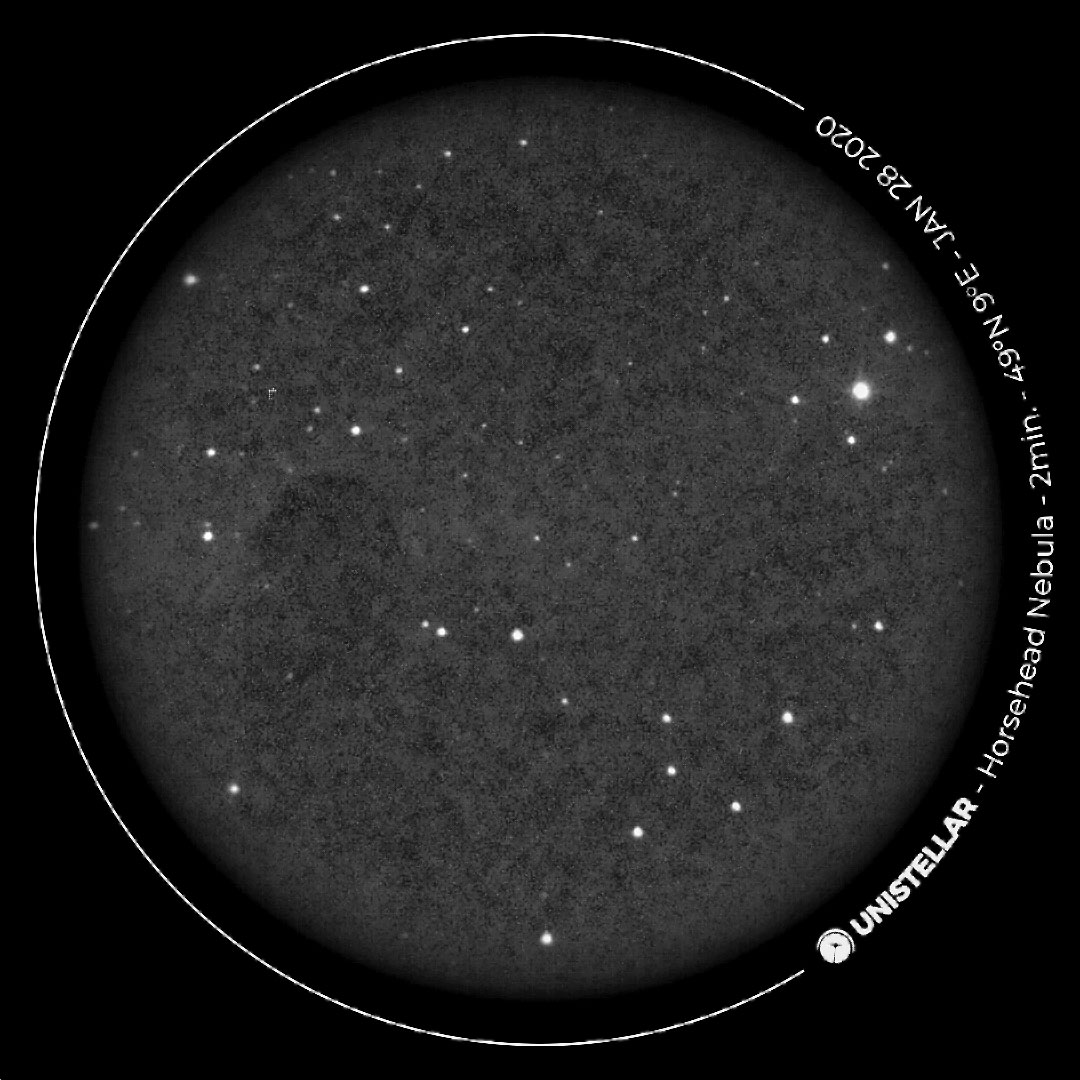
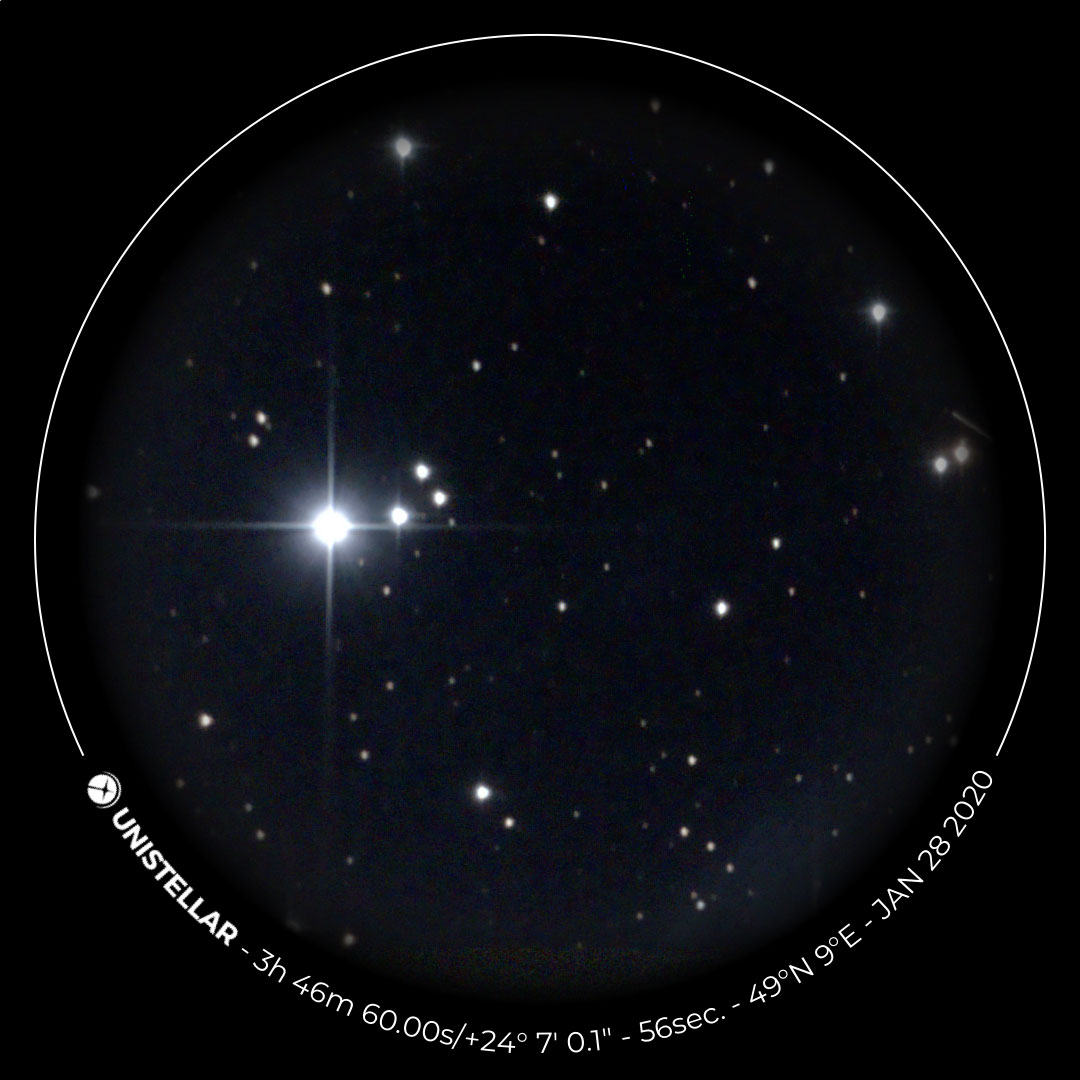
The following photos were taken during my very first observation night (January 28, 2020) with the eVscope. For some objects, there are comparison images available, which I took with the Atik Infinity camera.
 |
 |
 |
||
M 1 - eVscope, processed |
M 1 - eVscope, processed |
M 1 - Atik Infinity, processed and noise removed |
||
 |
 |
 |
||
M 78 - eVscope, processed |
B 33 - eVscope, heavily processed |
B 33 - eVscope, heavily processed, black-and-white |
||
 |
 |
 |
||
M 42/43 - eVscope, processed |
M 42/43 - eVscope, processed |
M 42/43 - Atik Infinity, processed |
||
 |
 |
 |
||
M 34 - eVscope |
M 34 - eVscope |
|
M 35 - eVscope |
|
 |
 |
 |
||
M 45 - eVscope |
M 45 - Atik Infinity, processed |
M 35 - Atik Infinity, processed |
Further Photo Attempts with the eVscope
The photos above and further early photo attempts with the eVscope are collected on page Unistellar eVscope - First Observation Sessions.
I collect my best photos in my eVscope photo galleries: Unistellar eVscope - Photo Gallery (Messier Catalog) - Unistellar eVscope - Photo Gallery (Other) - Unistellar eVscope - Specialty Gallery Part 1 - Part 2 - Part 3 .
Furthermore, I created overview pages that show just one photo of each object: Messier Catalog - Galaxies - Globular Star Clusters - Open Star Clusters - Nebulae
First Conclusions
For space reasons, I moved my first conclusions after owing the eVscope for
a little more than three months to an extra page: Unistellar
eVscope - First Conclusions.
From there: I am glad to have taken part in the Kickstarter campaign for the
eVscope, to have it already delivered and, despite a rough start, to be able
to use it quite a lot. I will not give it away anymore - and hope that this
opinion will hold for quite a number of years (and the eVscope as well). Thank
you Unistellar for this great telescope!
*) This
opinion held only until the end of 2021, then the eVscope
2 took over!
You can find my final conclusions on Page (Final) Conclusions.
Links
- Unistellar Website: unistellaroptics.com
- Compare our smart telescopes : eQuinox VS eQuinox 2 VS eVscope 2: help.unistellar.com/hc/en-us/articles/4406616411922-Compare-our-smart-telescopes-eQuinox-VS-eQuinox-2-VS-eVscope-2
- eVscope Kickstarter campaign: www.kickstarter.com/projects/unistellar/evscope-100-times-more-powerful-than-a-classical-t
- Stuck at Home Review: Unistellar eVscope (Tim, droid.life.com): www.droid-life.com/2020/04/21/stuck-at-home-review-unistellar-evscope
- Das eVscope (Peter Oden): evscope.de (in German)
- The Unistellar eVscope (Christopher Crim): crimdom.net/unistellar-evscope
- See also my page offering Astronomy Links.
Appendix: Data for the Unistellar eVscope
Hardware
- Magnification: 50 x optical / 400 x digital (adjusted in the app), 150 x recommended as maximum
- Maximum magnitude: up to 16 mag in standard night sky, 18 mag in optimal conditions
- Mirror diameter: 112 mm (BK7)
- Focal length: 450 mm
- Focal ratio: 1:4
- Motorized Alt-AZ mount
- Weight: 9 kg (19.8 lbs) including tripod
- Size: 65 cm tall and 23 cm wide (25.5" tall and 9" wide)
Bag
- Weight: 2 kg or around 4.5 lbs
- Size: 72 x 22.5 x 29 cm (H x W x D)
- Features see below
Electronics
- Sensor model: Sony IMX224 (CMOS) - for details see below
- Read noise: < 1e-
- Display: Micro-OLED (1,000,000:1 contrast ratio)
- Battery life: up to 9/10 hours (depending on the source...)
- 6 axis compass/accelerometer
- Wireless connectivity: Wifi or Bluetooth for smartphone or computer control and GPS access (no GPS inside)
Smarts
- Autonomous field detection
- Fully automated star alignment procedure
- Automated pointing
- Automated celestial tracking with feedback
- Field derotation
- Intelligent image processing
- Intelligent sensor settings
- Light pollution reduction
Sensor Data
- Sony Exmor IMX224 color CMOS sensor - 1.2 MPixels
- Sensor size: 1/3" diagonal* (4.8 mm x 3.6 mm), 1280 x 960 pixels (1305 x 977 pixels effective)
- Pixel size: 3.75 µm x 3.75 µm
- Pixel number (used by eVscope): 1280 x 960 (Live View), 2560 x 1920 (Enhanced Vision, upscaled)
- FOV: 27 arcmin x 37 arcmin
*) Diagonal: 6.09 mm (type 1/3, Quad VGA mode) or 5.59 mm (type 1/3.2, HD720p mode)
Backpack Features
Carefully designed with the world-leading manufacturer of large telephoto lens transportation bags, the eVscope backpack is made of tough reinforced fabric, and carefully padded with high-density foam to protect your telescope from any shock.
- Built-in foam inserts precisely match the shape of your eVscope
- Internal strap to securely fasten the instrument while backpacking
- Removable rainshield protects it from rain and humidity
- Padded adjustable shoulder straps
- Padded adjustable hipbelt to distribute the load weight
- Ventilated backpanel
- 5 small internal pockets. 2 zipped, 2 to hold telescope and eyepiece lid while observing
- 2 large external zipped pockets
- 1 hipbelt zipped pocket
The ideal accessory to take full advantage of the eVscope’s portability. (Source: Unistellar Help Center)
|
made by |
| 09.11.2025 |